
電場驅動軟性變形物質:突破無線操控限制與仿生應用的新型軟機器人
科技產業資訊室(iKnow) - 廖雅韻 發表於 2025年10月22日
圖、電場驅動軟性變形物質:突破無線操控限制與仿生應用的新型軟機器人
英國布里斯托大學與倫敦瑪麗皇后大學研究團隊成功開發出一種名為「電場驅動軟性變形物質」,稱為電變形凝膠(Electro-Morphing Gel, e-MG)的新型軟體機器人材料,其具備如漫威角色「毒液」(Venom)般的高可塑性與靈活變形能力,解決傳統無線驅動軟體機器人反應速度慢、形變複雜度低、難以獨立操控及控制系統笨重耗能等問題,能在輕巧電極所產生的非均勻電場驅動下,展現大幅度、多模式且複雜的形變與移動能力,展現出軟體機器人領域的重大突破,其研究成果發表於《Advanced Materials》期刊。
e-MG的卓越性能源於其精心設計的複合材料結構,由軟性彈性體基質、介電液體及奈米顆粒類晶碳三種核心成分協同構成。彈性體基質提供機器人的幾何結構框架與形變後的彈性恢復;介電液體作為塑化劑,有效降低彈性體網絡密度,顯著提升材料的柔軟度與可變形性;而奈米顆粒類晶碳則是最關鍵的組分,具備高比例表面積和優異的導電性,能提供豐富的自由電荷載子。碳顆粒的低密度特性使其即使在低濃度下也能形成滲透網絡,有效增強電學性能,同時對機械性能的影響微乎其微。
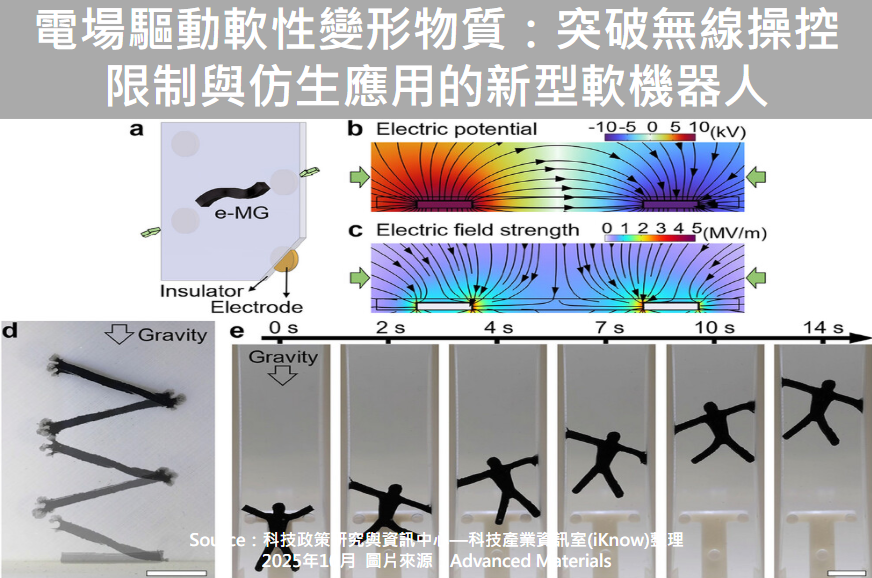
在驅動效能方面,e-MG的動作機制涉及介電泳力與靜電力的協同作用。由於材料內部的導電網絡在高強度電場下能提供高密度的移動電荷,在直流驅動模式下,靜電力通常占據主導地位,使響應更迅速、更強勁;而介電泳力則在非均勻電場環境中將可極化材料推向電場強度較高的區域。透過精確控制遠端輕巧電極所建立的非均勻電場,e-MG實現了精準動作,成功突破傳統軟體機器人反應緩慢、變形受限的技術瓶頸。
e-MG機器人能夠執行豐富多樣的形變和移動模式,包括旋轉、平移、伸展、彎曲、扭曲等動作,最大應變可達286%,應變率高達500%/s。其中,擴散行為是最獨特的功能特徵,可使表面積與體積比顯著增加。當e-MG與電極接觸時,會發生最劇烈的擴散形變,此動態反應模式類似於黏菌對環境刺激的響應機制,展現出生物系統般的適應性與靈活性。
e-MG的操控可透過控制電極的參數實現,例如電壓、信號、電極位置和幾何形狀。此外,e-MG在應用潛力上具備多樣性與突破性,橫跨生物啟發應用、複雜移動能力及多機器人協作。
在生物啟發應用方面,e-MG展現出卓越的仿生能力,例如可模仿蝸牛先伸展後收縮的行為跳過間隙;仿效壁虎利用獨特的擴散變形在垂直牆壁上穩固錨定並向上攀爬;以及作為類似蛙舌的夾持器,能夠在不到兩秒內迅速伸長捕捉並黏附貨物,關閉電壓後恢復原狀提起物體,極具靈巧性。
在複雜移動方面,e-MG已驗證其沿著圓錐形表面向上滾動的3D移動能力,甚至能模擬果凍形狀之人體操運動員,透過彎曲肢體沿著天花板擺動前進。此外,e-MG的操控策略帶來顯著的多機器人操控優勢,允許在近距離內建立局部電場,使得多個e-MG機器人即使緊密相鄰,仍能實現同步與獨立的操控,突破了磁場驅動軟機器人難以近距離獨立操控的限制。
電場驅動的e-MG機器人憑藉其獨特的複合材料設計和高效的機電耦合機制,成功克服了傳統軟機器人在無線驅動和精確控制方面的限制。其卓越的形變能力和獨立操控優勢,使其在軟性機器人、靈巧操控和太空探索等廣泛應用領域中具有巨大的發展潛力。(1223字;圖1)
參考資料:
Shapeshifting soft robot uses electric fields to swing like a gymnast. TechxPlore, 2025/10/16
Electric Field Driven Soft Morphing Matter. Advanced Materials, 2025/6/12
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|