
基礎設施也能「看見」道路:EyeDAR仿生雷達為自駕車打造城市級感知網絡
科技產業資訊室(iKnow) - 黃松勳 發表於 2026年3月5日
圖、基礎設施也能「看見」道路:EyeDAR仿生雷達為自駕車打造城市級感知網絡
隨著自動駕駛技術逐步從測試場域走向實際道路環境,如何提升其在複雜交通情境下的安全性成為產業與研究界關注的焦點。多數自駕車目前依賴車載感測系統,如攝影機、LiDAR與雷達來辨識周遭環境,但在雨霧、低光或遮蔽物較多的情況下,仍可能出現感測盲區。近期,美國萊斯大學(Rice University)工程團隊提出一種名為EyeDAR的新型道路側雷達感測器,透過基礎設施提供額外感測能力,為自駕車打造「第二雙眼睛」,進一步降低交通風險。
傳統自駕車安全設計大多集中於車輛本身的感測與運算能力,但研究團隊認為,若要實現更高等級的自動駕駛,單靠車輛設備仍難以完全克服視角限制。EyeDAR的概念是將感測能力延伸至道路基礎設施,例如交通號誌、路燈或路口設施,透過外部雷達捕捉車輛自身難以接收到的訊號反射,並將資訊回傳給車輛。這種「車路協同」的設計,使自駕車能在轉角或遮蔽物後方提前感知潛在風險,大幅提升交通安全。
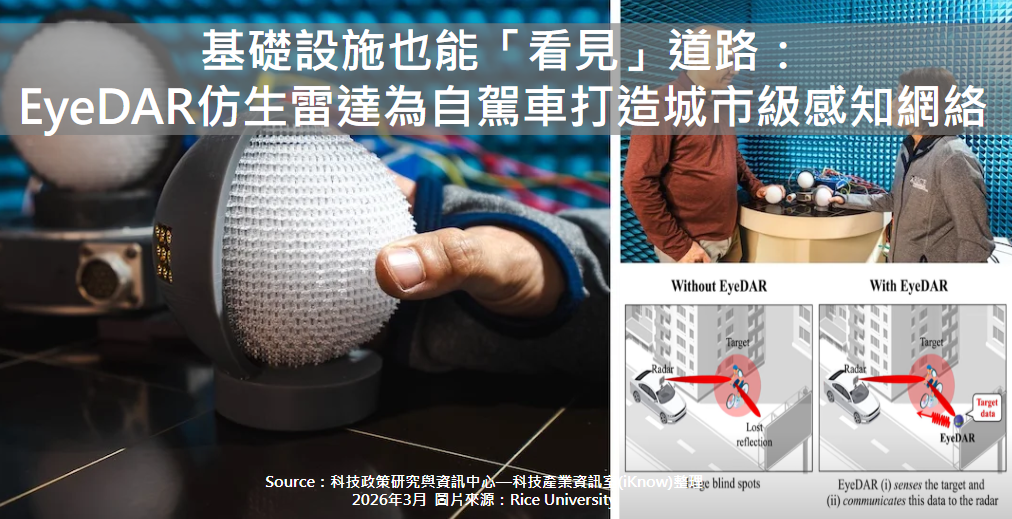
EyeDAR的核心設計靈感來自人類眼睛,其結構主要由兩個部分組成:前端為3D列印的龍伯透鏡(Luneburg Lens),後方則為環形天線陣列。透鏡的作用類似人眼水晶體(Crystalline Lens),可將來自各方向的毫米波雷達訊號聚焦至特定位置;而後方的天線陣列則如同視網膜(Retina),負責偵測訊號並判斷其方向。透過這樣的仿生架構,EyeDAR能夠在不依賴複雜運算的情況下,快速辨識來自不同方位的雷達回波訊號。
在現有自駕車系統中,雷達訊號發射後只有極少部分會反射回原裝置,大量訊號會散射至其他方向,導致車輛難以取得完整環境資訊。例如行人從大型卡車後方突然出現,或自行車以特殊角度接近路口,都可能落在車輛感測盲區之中。EyeDAR安裝於路口或高處基礎設施後,能捕捉這些原本被忽略的雷達反射訊號,並將方向資訊傳回車輛,使自駕系統得以提前掌握潛在危險。
與傳統雷達依賴大型天線陣列與演算法進行角度推算不同,EyeDAR的設計將大量運算工作交由硬體完成。其透鏡內部由超過8,000個不同折射率的小型結構組成,可在訊號進入時直接完成波束導引與聚焦,這種方式被研究團隊稱為「類比運算(Analog Computing)」。透過硬體結構本身完成運算,不僅能降低功耗,也能顯著縮短訊號處理時間。
實驗結果顯示,相較於傳統雷達系統,EyeDAR在辨識目標方向上的速度可提升200倍以上。這對自動駕駛系統而言至關重要,因為方向判斷通常是雷達運算中最耗費資源的部分。當感測與運算效率提升後,不僅能減少車輛端的運算負擔,也使得在城市中部署大量感測節點成為可能。
EyeDAR的另一項創新在於其通訊方式。與一般雷達不同,它並不主動發射訊號,而是透過吸收與反射來自車輛的雷達波,並以類似「摩斯密碼」的方式將資訊回傳。換言之,感測與通訊功能被整合在同一個裝置之中,使其成為一種能夠與車輛雷達互動的「會說話的感測器」。這種設計大幅降低功耗與硬體成本,也提升部署可行性。
研究團隊認為,若EyeDAR能夠大規模部署於交通號誌、路燈或路口設施上,城市道路將形成一個分散式的感測網絡。透過多個感測節點共享資訊,自駕車不僅能看見自身視野範圍內的環境,也能取得更遠距離甚至轉角後方的交通資訊。此類系統對於車流密集的都市環境尤其重要,能有效降低盲區事故的發生機率。
除了自動駕駛汽車外,EyeDAR技術也具有跨領域應用潛力。例如配送機器人、無人機或穿戴式裝置,都可能透過這類低功耗雷達感測器獲得更好的環境感知能力。若未來感測器之間能建立互聯網絡,各裝置甚至能共享彼此的感測資料,形成更完整的環境資訊系統。
EyeDAR展現了一種不同於傳統車載感測的發展路徑,即透過道路基礎設施建立外部感知網絡,以補足自駕車本身的視覺限制。隨著智慧城市與車路協同技術持續發展,未來交通安全的提升可能不僅依賴車輛本身的人工智慧,也需要智慧化道路系統共同參與,打造更完整且可靠的自動駕駛生態。(1483字;圖1)
參考資料:
Orange-sized roadside radar ‘eyes’ aim to reduce self-driving vehicle blind spots. Interesting Engineering, 2026/3/3
Biomimetic EyeDAR looks to boost self-driving safety. The Engineer, 2026/3/4
Extra ‘Set Of Eyes’ For Self-Driving Cars: Roadside Radar Sensors Could Reduce Blind Spots. Eurasia Review, 2026/3/3
Roadside ‘EyeDAR’ Sensors Give Self-Driving Cars New Vision. The University Network, 2026/3/4
--------------------------------------------------------------------------------------------------------------------------------------------
【聲明】
1.科技產業資訊室刊載此文不代表同意其說法或描述,僅為提供更多訊息,也不構成任何投資建議。
2.著作權所有,非經本網站書面授權同意不得將本文以任何形式修改、複製、儲存、傳播或轉載,本中心保留一切法律追訴權利。
|